목차
선분 검출
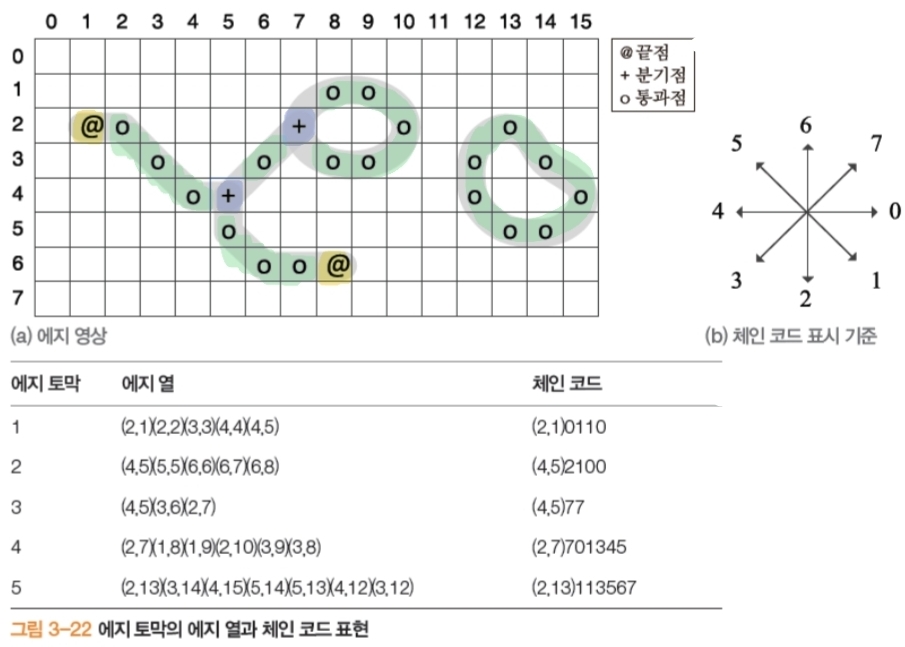
1. 에지 연결과 표현
| 성분 | 주변 에지 성분 개수 |
|---|---|
| 끝점 | 1 |
| 통과점 | 2 |
| 분기점 | 3개 이상 |
- 에지 성분만 표현하는 방법
- 체인 코드: 에지(또는 이진 경계)를 순회하며 방향만 기록해 경계를 표현하는 방식이다
- 에지 토막: 연결된 에지 픽셀을 짧은 곡선/선분 단위의 폴리라인으로 묶어 표현한다
poly line: 여러 개의 선 부분이 연속적으로 연결된 곡선 또는 직선 형태의 경로
2. 선분 근사
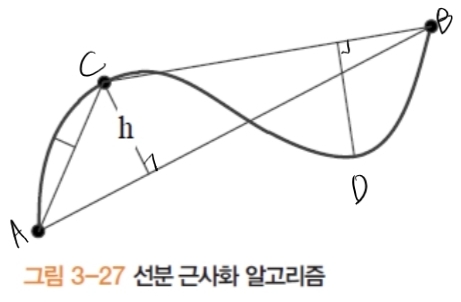
- 두 끝점을 잇는 직선으로부터 가장 먼 점까지의 거리 $h$가 임계값 이내가 될 때까지 선분 분할을 재귀적으로 반복한다
3. Voting Schemes
 투표(voting) 기반 모델 추정: 특징(feature)들이 자신과 양립 가능한 모델들에 표를 던지고, 표가 많이 모인 모델을 정답으로 뽑는다
e.g. 허프 변환(Hough transform), RANSAC의 합의 집합(consensus set)
투표(voting) 기반 모델 추정: 특징(feature)들이 자신과 양립 가능한 모델들에 표를 던지고, 표가 많이 모인 모델을 정답으로 뽑는다
e.g. 허프 변환(Hough transform), RANSAC의 합의 집합(consensus set)
3.1. 개념
- 각 특징 $f_i$가 “나와 부합(compatible) 하는” 모든 모델 파라미터 $\theta$에 표를 던짐 → 누적기(accumulator)에 카운트
- 잡음(outlier)은 표를 여기저기 흩뿌려서 어느 한 모델에도 표가 집중되지 않음
- 일부 특징이 누락(occlusion, missing data) 되어도, 남은 특징들이 같은 좋은 모델에 표를 몰아주면 검출 가능
3.2. 노이즈
3.2.1. 노이즈가 미치는 영향
- 피처 공간의 균일 잡음은 누적 배열에 허위(spurious) 피크를 만든다. 노이즈가 커질수록 최대 득표 수 자체도 증가해 진짜 피크가 흐려지고(peak fuzziness) 위치도 불안정해진다.
3.2.2. 노이즈 대응 전략 (Hough 기준)
- 격자(grid)/이산화(discretization) 해상도 선택
- 너무 조잡(coarse): 서로 다른 선/모델이 한 버킷에 섞여 득표 과다.
- 너무 세밀(fine): 같은 모델 점들도 미세 오차로 서로 다른 버킷에 흩어짐.
- 누적 배열 평활화: 이웃 bin까지 증가(smoothing)해 노이즈로 인한 들쭉날쭉함을 완화.
- 무관한 피처 제거: 큰 그래디언트를 가진 에지 포인트만 사용해 투표 품질을 올림.
3.2.3. 장단점
- 장점: 부분 가림/비국소성에 강함, 복수 객체 동시 검출, 노이즈에 어느 정도 강인(노이즈 점들은 한 bin에 일관되게 모이기 어려움).
- 단점: 파라미터 수가 늘면 탐색 복잡도 급증, 비목표 형태가 허위 피크 생성, 격자 크기 선택이 어렵다
3.3. 동작
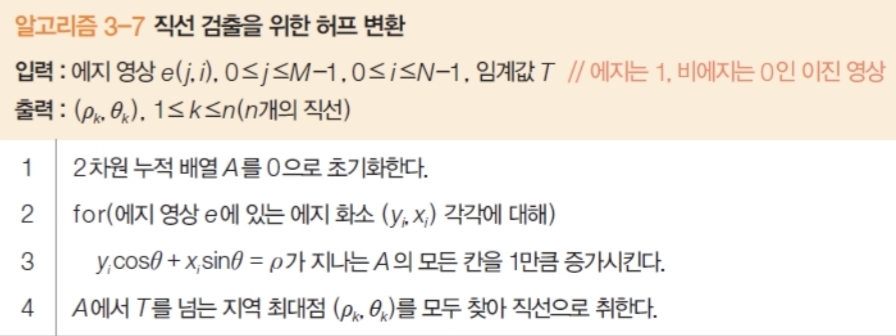
- 모델 정의: 예) 직선 $\rho = x\cos\theta + y\sin\theta$ (극좌표)
- 파라미터 공간 분할: $(\rho,\theta)$ 격자 만들기
- 투표: 에지 픽셀 등 특징점 $(x,y)$마다 가능한 $\theta$를 훑으며 해당 $\rho$ 계산 → 해당 버킷 $(\rho,\theta)$에 +1
- 피크 찾기: 누적기가 큰 버킷(피크)을 모델 후보로 선택
- 정제(refine): 피크에 투표한 점들을 모아 최소자승 등으로 파라미터 미세 조정
3.4. 특징
3.4.1. 장점
- 잡음/가림(occlusion)·부분적 누락에 매우 강건
- 잡음 특징: 호환 가능한 모델이 제각각 → 표가 분산 → 큰 피크를 못 만듦
- 누락 데이터: 일부 표가 빠져도 남은 표가 임계치 이상 모이면 피크 유지 → 검출 가능
- 복수 개의 모델(여러 직선/원)도 피크 여러 개로 동시에 검출
- 병렬화 쉬움
3.4.2. 단점
- 파라미터 차원이 커질수록 격자 수 폭증(계산·메모리 부담, 양자화 오차)
- 버킷 크기/임계치에 민감(과도한 스무딩은 피크 손실, 너무 세분화하면 잡음 피크 증가)
- 근접한 피크 병합/해석이 필요
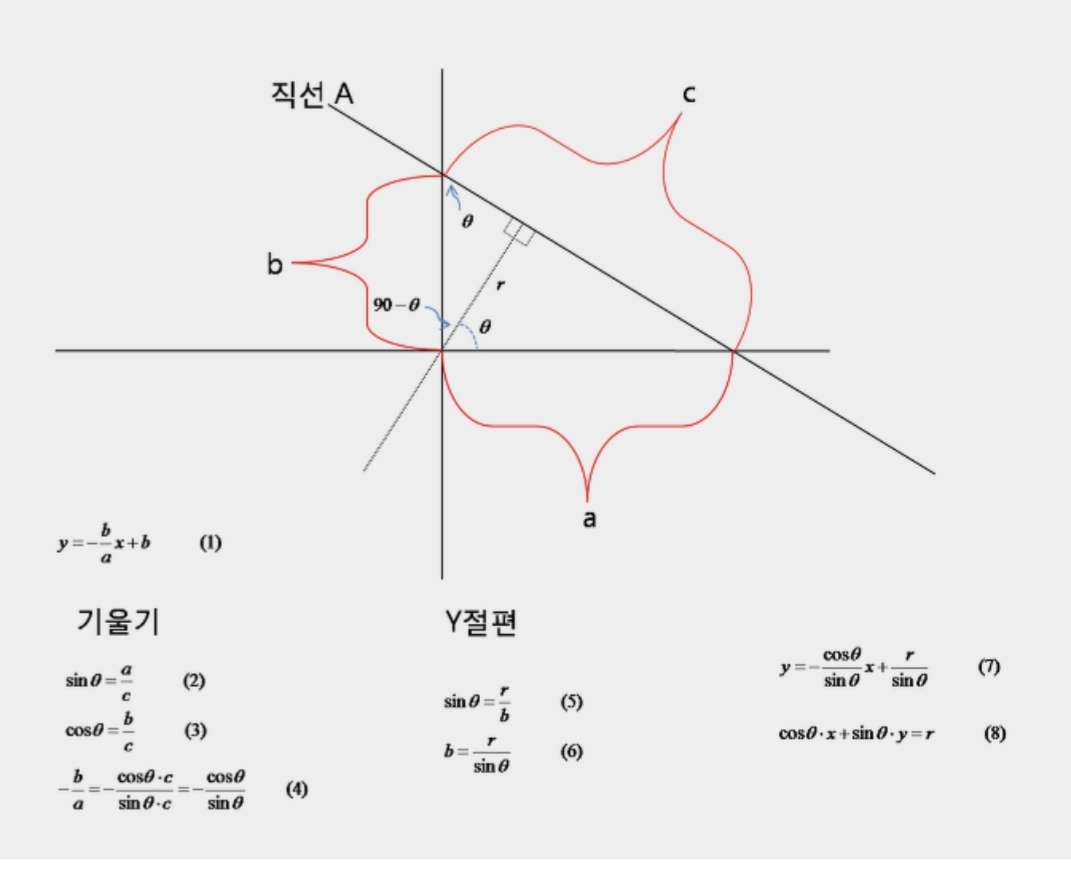
4. 허프 변환(Hough Transform)
4.1. 개념
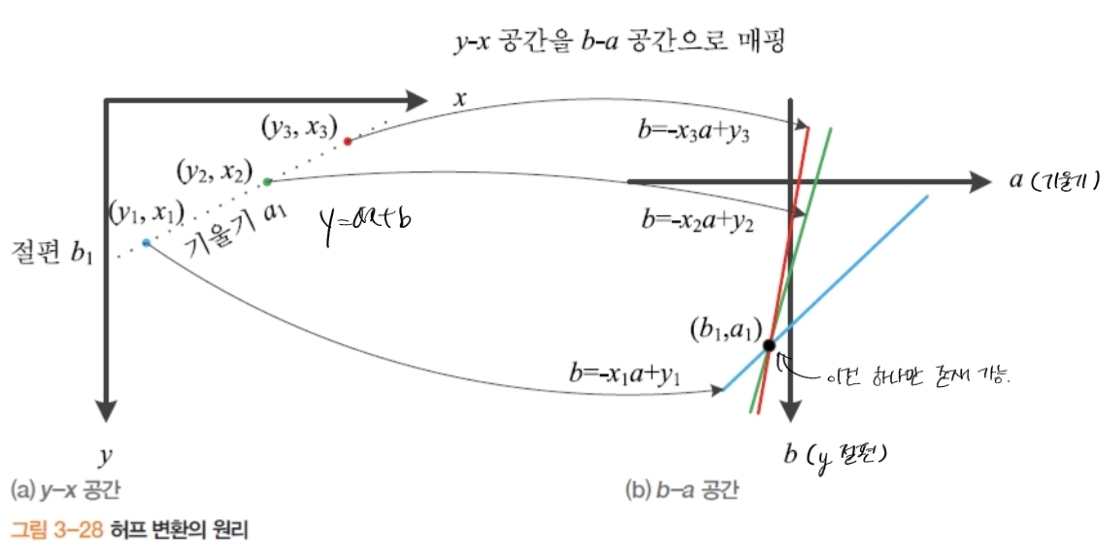
- 허프 변환: 차원의 변환, 좌표계의 변환
- 에지 연결 과정 없이 선분 검출 (전역 연산을 이용한 지각 군집화)
- 영상 공간 y-x 를 기울기 절편 공간 b-a 로 매핑
- 일반 절차:
- 파라미터 공간을 격자(bin) 로 이산화
- 영상의 각 에지점이 가능한 모든 파라미터 bin에 투표
- 누적배열의 피크를 검출.
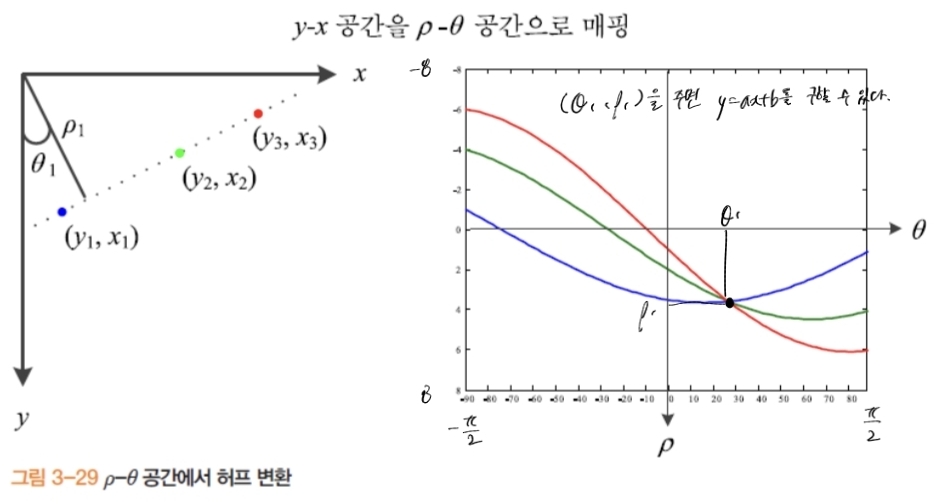
- 파라미터 범위가 무한, 수직선에서 $m\to\infty$ 문제가 발생.
- 극좌표 대안: $\rho=x\cos\theta+y\sin\theta$
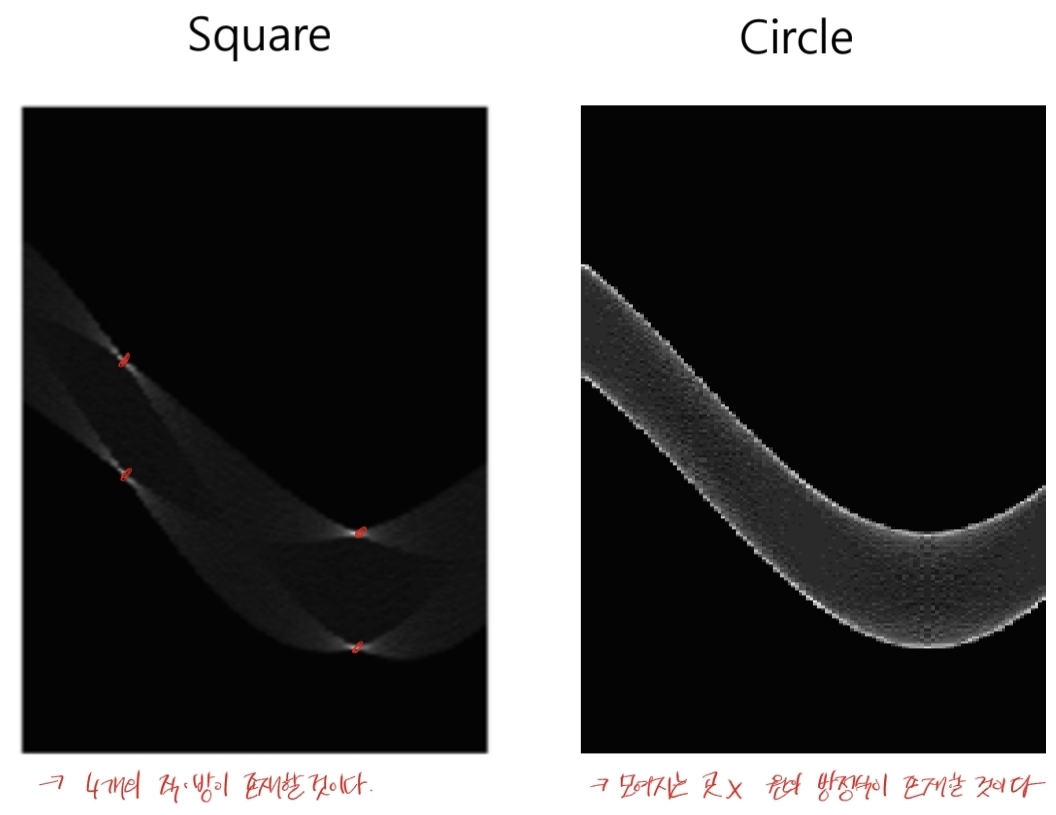
4.2. 원 검출
- 원 검출: 3차원 누적 배열 사용
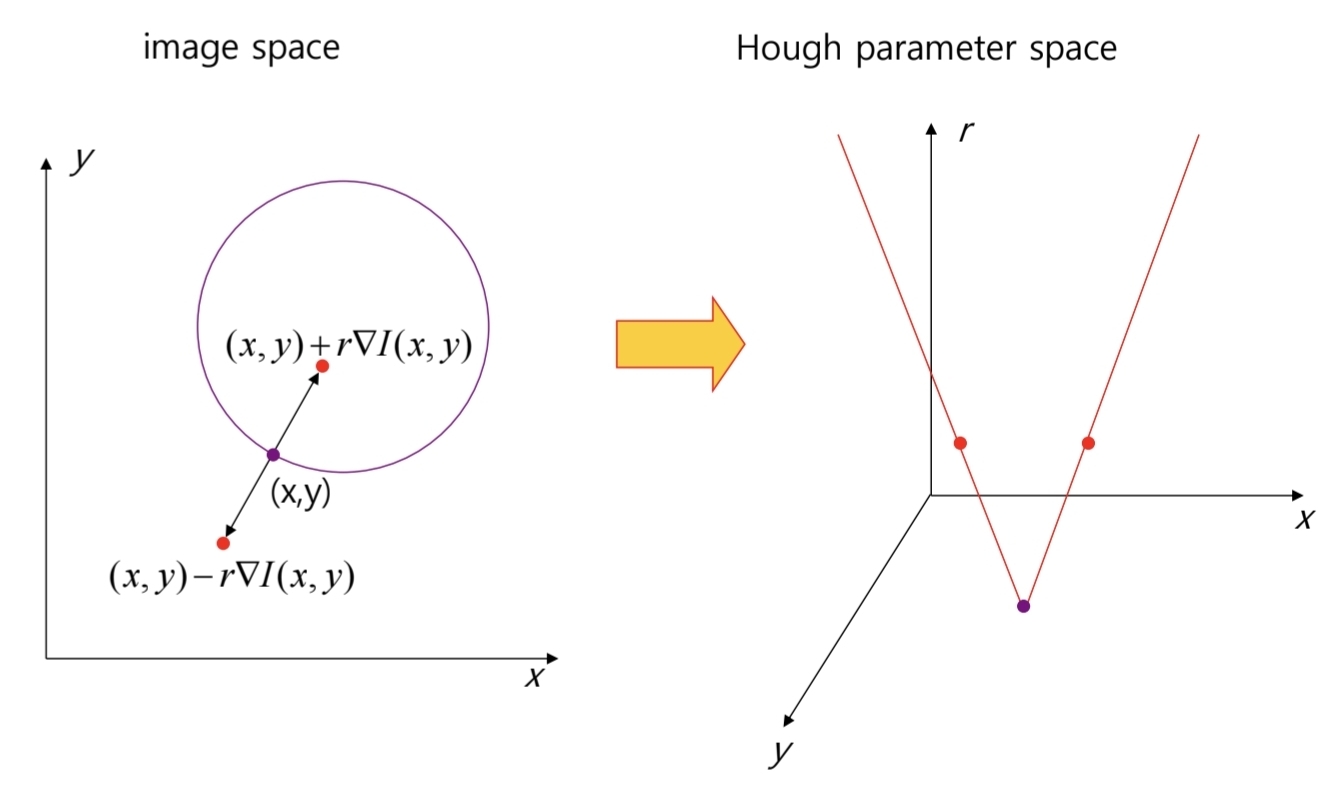
- $(y - b)^2 + (x-a)^2 = r^2$
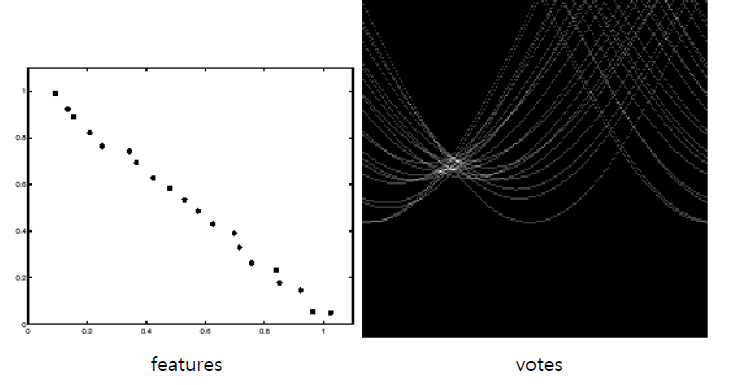
- 해석 관점: 영상의 한 점 $(x_0,y_0)$은 허프 공간에서 사인곡선이며, 두 점 곡선의 교차가 두 점을 지나는 직선의 파라미터.
4.3. 특징
- 장점:
- 가림(occlusion)·비지역성에 강함
- 다중 인스턴스 검출
- 어느 정도 노이즈 강건.
- 단점:
- 파라미터 수↑ 시 시간/메모리 지수적 증가
- 비목표 형상이 허위 피크 유발
- 격자 크기 선택 난이도
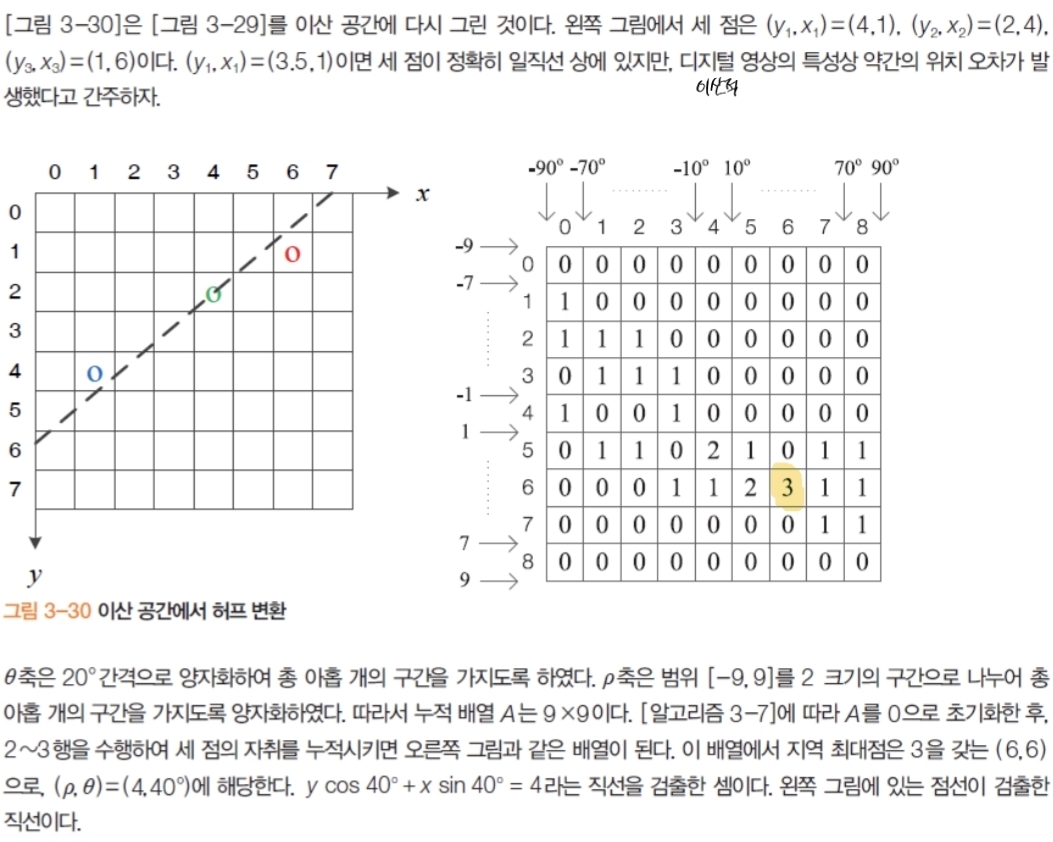
8 * 8 사이즈에서 9 * 9 사이즈가 된 걸 보면 허프 변환이 모든 상황에서 더 효율적인 것은 아닌 것 같다
5. Implicit Shape Model (ISM)
- 훈련: 관심점 주변 패치 → 클러스터링으로 코드북 구성 → 각 코드북 항목에 대해 객체 중심 상대 위치(변위)들 저장.
- 테스트: 패치→가까운 코드북 항목으로 매칭 → 객체 중심 후보에 투표 → 투표공간 최대값 탐색 → 저장된 마스크들을 가중 결합해 분할.
- 세부 이슈: 투표공간이 연속이므로 클러스터링 필요, 스케일은 다중 스케일 탐색 또는 특징 자체의 특징 스케일 활용, 마지막에 검증 단계(정교 템플릿·마스크 전이) 중요.
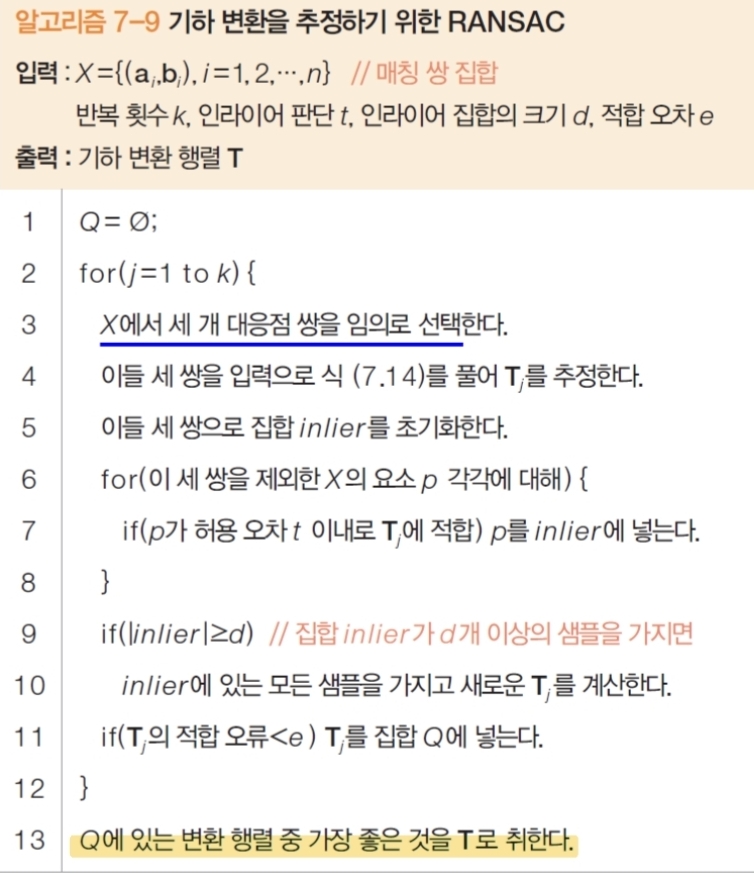
5. RANSAC — 불량치(outlier) 견고 추정
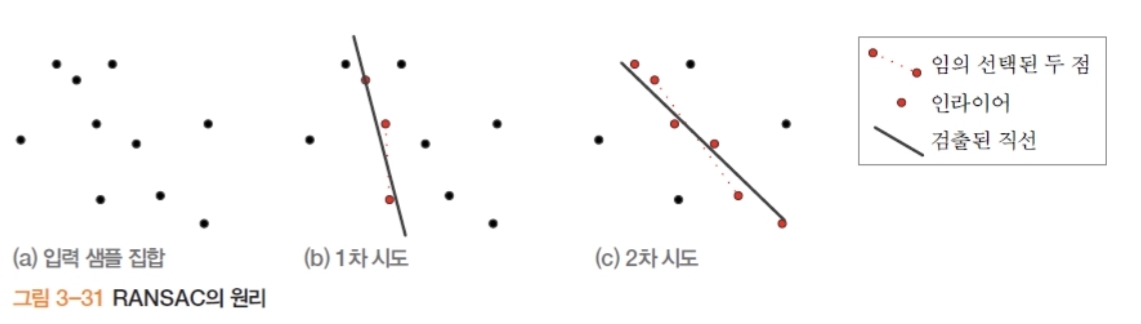
- 정의/배경: Fischler & Bolles(1981). 인라이어 집합을 찾아 모델을 견고하게 적합(무작위 표본 기반). 선분 검출에선 모델을 $y=ax+b$로 둔다.
- 동작
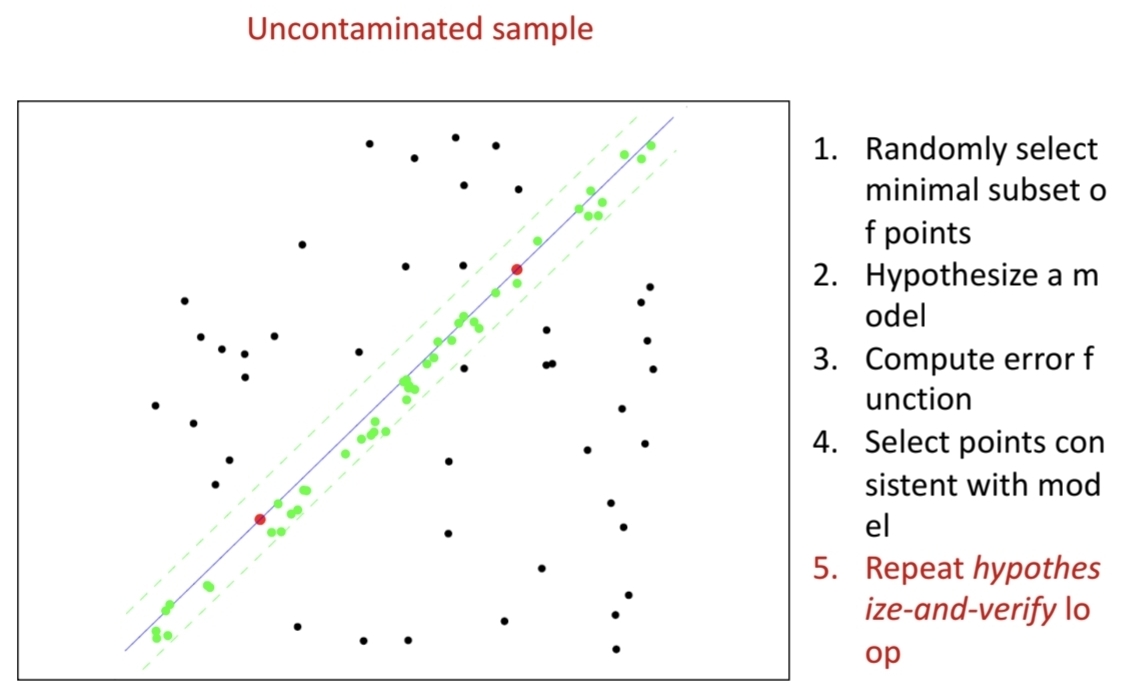
- 최소 표본 무작위 선택, 무작위로 두 점을 골라 직선의 방정식을 구함
- 모델 가설, 구한 방정식으로부터 일정 범위의 속한 점들이 전체의 몇 %인지 구함
- 오차함수 계산
- 일치(inlier) 집합 선택, 전체 80%가 포함되지 않으면 두 점을 버림
- 반복.
- 확장 포인트: 점-점 매칭쌍 $X={(a_i,b_i)}$ 입력도 처리하도록 일반화(기하 추정에 활용).
- 알고리즘
5.1. Hough V.S. RANSAC
- 허프: 파라미터가 저차원이고 폐형식(직선·원 등)이 있을 때 단순·효율적.
- RANSAC: 복잡하거나 고차원 모델, 불균일한 불확실성에서 유리. 표본 추출 → 가설 모델 → 인라이어 카운트로 투표와 유사한 합의를 구함.
Comments