목차
칼라
1. 컬러의 본질과 인지
- 정의: 컬러는 “환경의 물리적 빛”과 “우리 시각계”의 상호작용 결과이며, 물체의 고유 물리량이 아니라 지각적 성질이다(S. Palmer 인용) .
- 시각생리:
- Rod(간상세포): 명암 인식
- Cones(원추세포): 색상 인식
- 비율 L:M:S ≈ 10(R):5(G):1(B)
- 중심와에는 S-콘이 거의 없음 .
- 착시: 조명·반사 경계가 섞여 지각이 왜곡되는 Checker shadow illusion 사례로 동기 부여 .
2. 물리광학과 스펙트럼
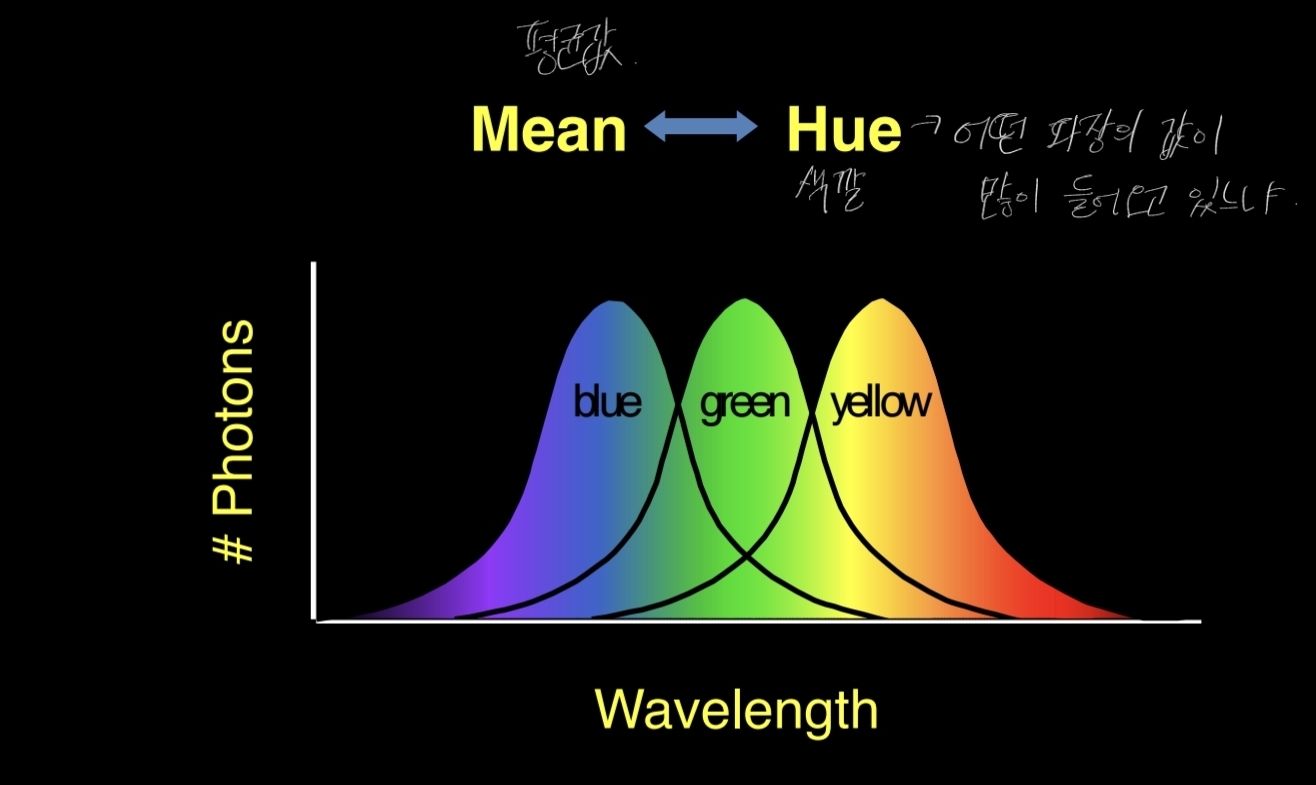
- 광자/파장 관점: 파장 분포(정규분포 가정)
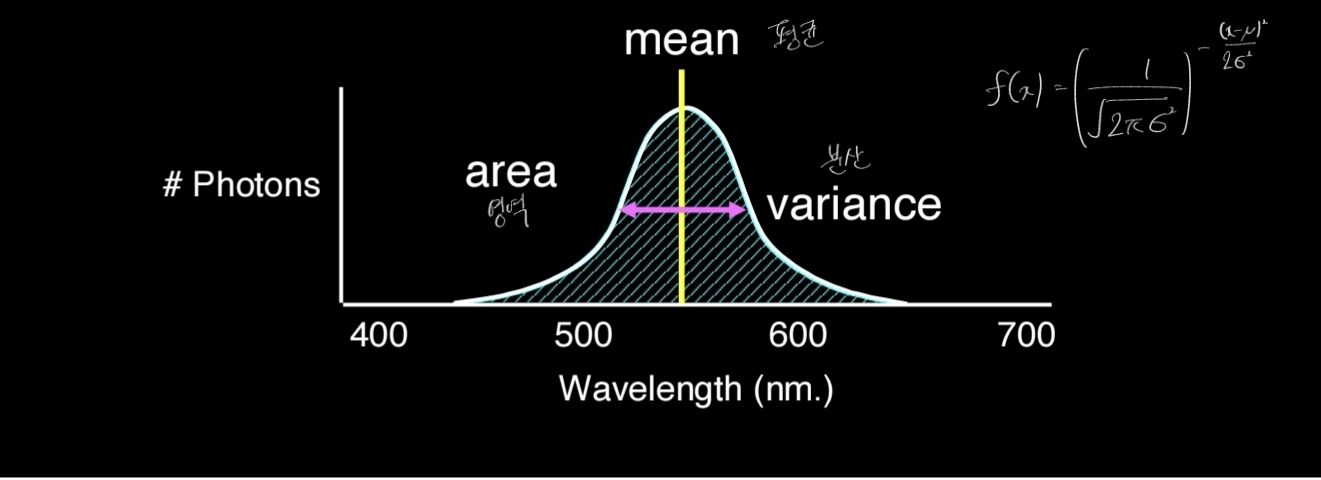
- Mean(평균) → Hue(색상)
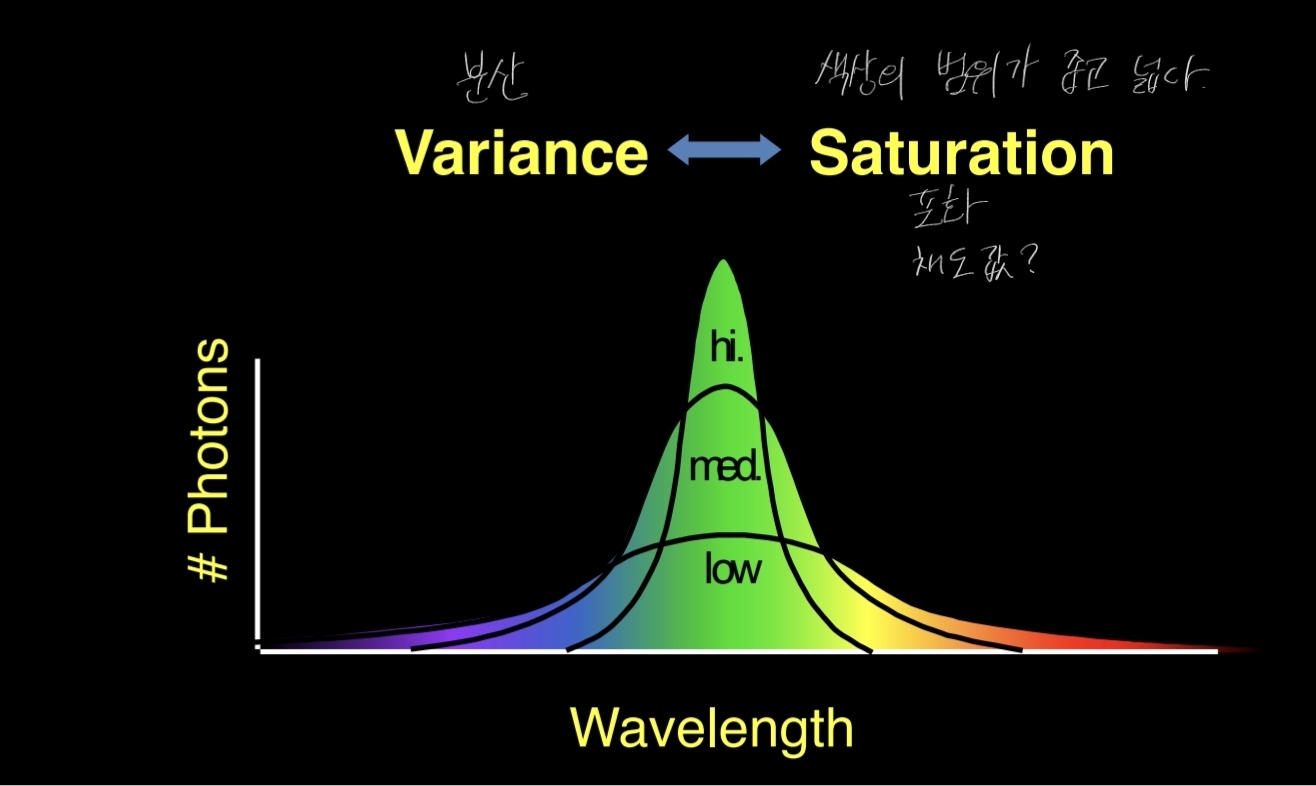
- Variance(분산) → Saturation(포화)
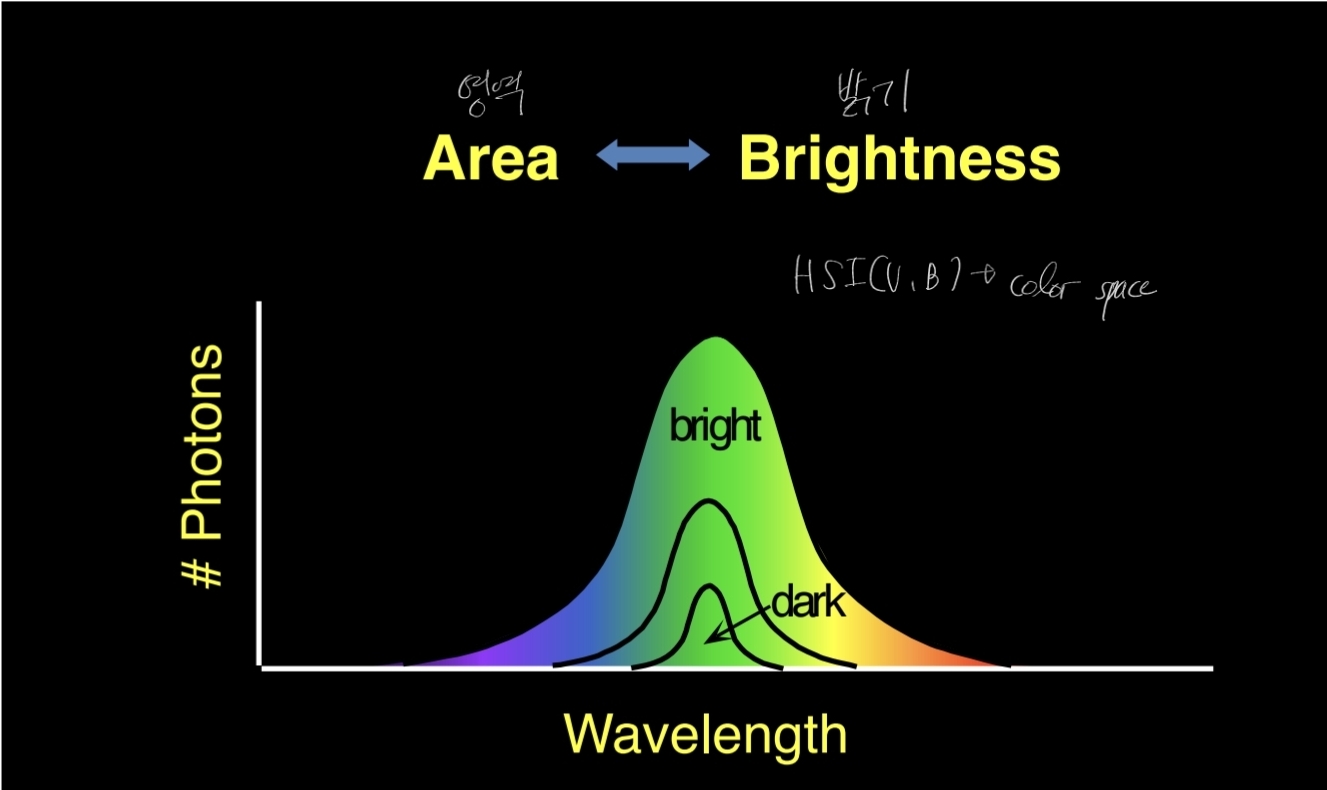
- Area(면적) → Brightness
- 반사 스펙트럼: 표면(빨강·노랑·파랑·보라)의 파장별 반사 특성이 색상의 지각을 좌우 .
3. 컬러 공간과 표현
- RGB(선형 공간)
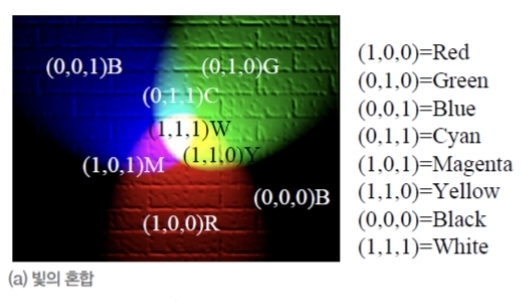
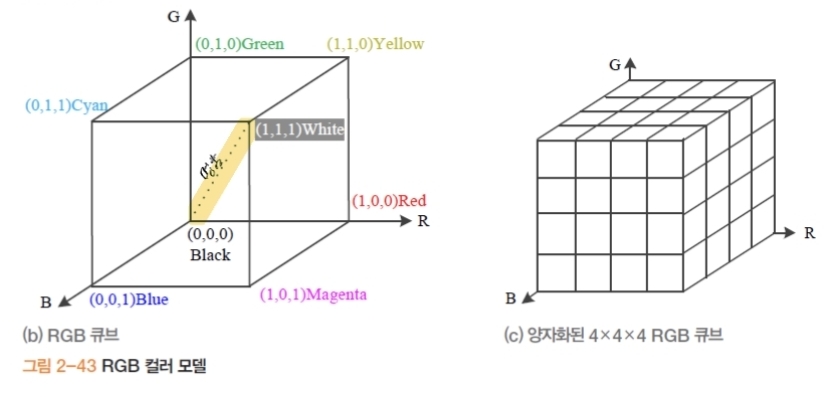
- 1×1×1 정육면체로 색 표현
- 영상은 ($f_r, f_g, f_b$) 세 채널로 저장/처리
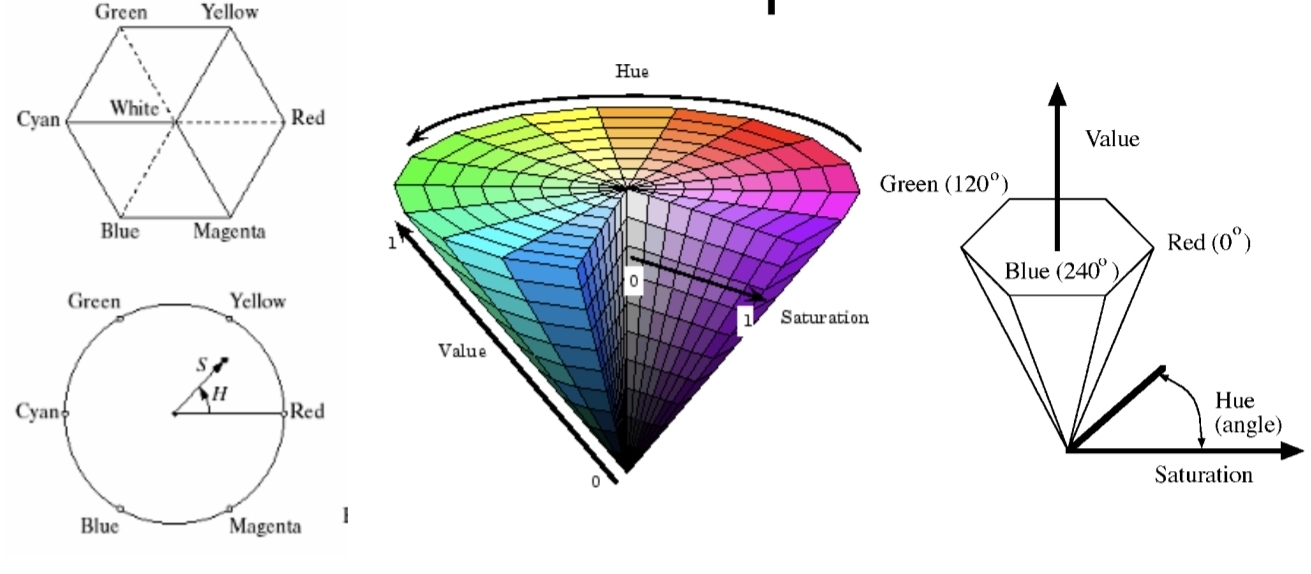
- HSI/HSV(비선형, 지각 축)
- HSI → I(Intensity): 평균 밝기
- HSV → V(Value): 최대 채널 기반 명도
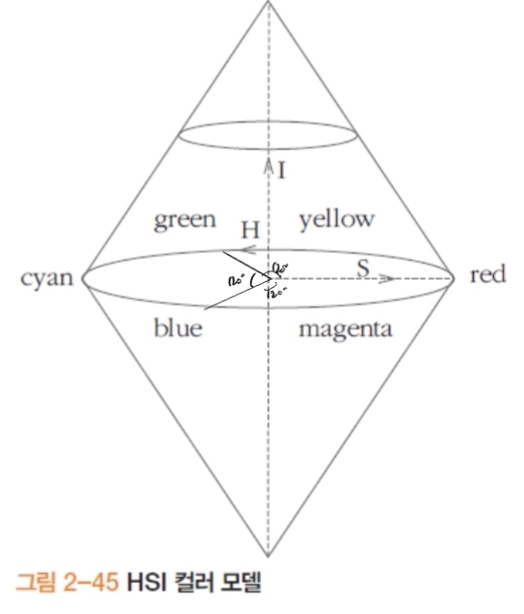
- 이중 콘으로 색을 표현
- Hue–Saturation–(Inteensity/Value)로 분해해 과업 적합성 향상(조명 변화 대응 등) .
- 처리 전략: 가장 단순한 접근은 채널 독립 처리
“컬러 영상은 R/G/B 세 장의 2D 영상이 결합된 것으로 저장된다” 흑백(그레이스케일)은 0–255 범위로 표현한다
4. 컬러 활용
- 컬러 히스토그램 기반 매칭: Swain & Ballard ‘Color Indexing’(IJCV’91) 소개 .
- 세그멘테이션/질의: Blobworld(EM 기반 컬러 세그멘테이션) .
- 피부색 검출: 통계적 컬러 모델(IJCV’02) .
- 트래킹: Appearance 모델 학습을 통한 사람 추적(PAMI’07) .
- 로봇 축구: 팀/공 객체를 색 인식으로 추적·전략 수립(예시) .
상단 카메라와 색종이 마커로 우리 팀/상대/공 위치를 실시간 인식해 전술을 세우는 고전적 로보컵 사례를 설명함 .
Comments